手 机:156-8307-9413
座 机:023-6036-9667
邮 箱:safetech@cqsafetech.com
网 址:www.cqsafetech.com
重庆地 址:重庆市两江新区翠云街道云竹路21号1B幢6层
广州办事处:广州花都区碧桂园星港国际B区2栋623号
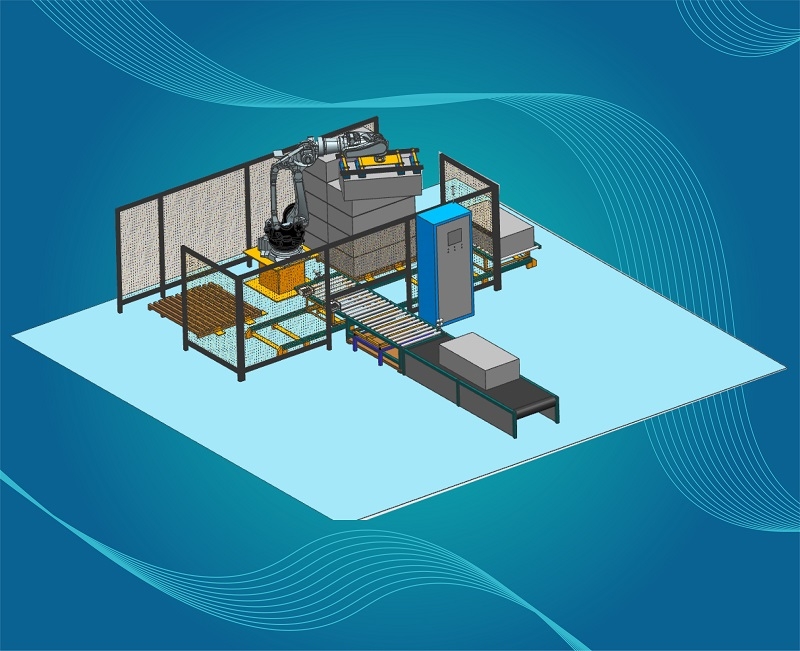
工业机器人应用系统集成设计需围绕需求分析、硬件选型、布局规划、通信设计、软件编程、安全防护、安装调试、维护管理八大核心环节展开,具体要求如下:
一、需求分析:定位生产目标
明确生产任务:需摸清生产需求,例如汽车焊接需明确焊接点位数量、工件尺寸范围、节拍速度等参数;电子装配需确定精度要求(如±0.02mm)、工作范围等。
预留性能冗余:建议实地测量、模拟测试,并按10%-15%比例预留性能冗余,避免因工件重量波动或产品更新导致选型错误。例如,某电子厂因未考虑产品更新,机器人工作范围无法适配新机型,被迫二次改造,成本增加30%。
评估环境适配性:需考虑温度、湿度、粉尘、水雾等环境因素。例如,某卫浴企业未评估水雾环境对导轨的影响,导致机器人锈蚀,维修费超预算60%。
二、硬件选型:匹配生产需求与场景
机器人本体选择:
负载能力:搬运码垛场景需侧重负载(如20kg以上),电子装配需高精度(±0.02mm)。
兼容性:末端执行器接口需与机器人腕部兼容。某食品包装项目因选用通用型机器人导致真空吸盘接口不匹配,延误工期两个月。
性能测试:对照ISO9283标准测试实际性能,关注重复定位精度、工作半径等指标。
周边配套设备:
根据加工工艺选择作业装置、工装夹具、伺服执行单元等。例如,弧焊作业需配套弧焊电源、送丝机、焊烟净化器等。
标准化部件直接采购,非标部件需根据空间布局设计优化。例如,复杂焊件需采用变位机增加机器人自由度。
三、布局规划:优化物料流动与空间利用
遵循“物料流Z短”原则:某汽车焊装线将6台机器人布置成环形,比直线布局减少15%物料转运时间。
考虑人机协作空间:协作机器人应用需预留安全操作空间,某家电装配线引入8台负载5kg的协作机器人,空间利用率提高40%。
预留维护与扩展空间:需为后期维护、设备升级预留至少1m的操作空间,并预留通信接口和电力冗余。
四、通信设计:保障数据传输稳定性
统一通信协议:采用工业以太网、Profinet等标准协议,避免不同设备间协议不兼容。某家电企业因PLC与机器人控制器采用不同总线协议,导致信号延迟0.5秒,整线效率下降8%。
设计冗余通信链路:关键数据传输需配置双链路备份,防止单点故障导致系统瘫痪。
低延迟网络架构:5G技术可降低通信延迟至1ms以内,某工程机械厂商通过5G云平台实现全球152台机器人实时监控。
五、软件编程:实现智能化控制
离线仿真编程:通过RobotStudio、ROBOGUIDE等软件模拟运行,减少50%现场调试时间,但需确保3D模型与实际设备误差小于2mm。
模块化程序架构:将焊接、搬运等工艺封装为独立模块,便于快速调用和修改。例如,某轮胎检测线通过深度学习算法实现缺陷识别模块化,准确率达99.7%。
人机交互界面设计:采用触摸屏或移动终端操作,界面需直观显示设备状态、故障报警等信息。某汽车零部件厂通过“故障模拟箱”培训,使平均故障处理时间从45分钟缩短至18分钟。
六、安全防护:构建多层级保障体系
物理安全防护:
安全围栏高度≥1.8米,急停按钮间隔≤3米。某铸造厂因安全光幕安装角度偏差10度,导致工人误入危险区域受伤。
防护等级匹配环境要求,潮湿环境需选用IP65以上防护等级设备。
电气安全标准:严格执行GB5226.1标准,接地电阻≤4Ω,绝缘电阻>1MΩ。
功能安全设计:采用安全PLC或安全控制器,实现急停、安全限位、碰撞检测等功能。例如,力觉控制技术可实时监测碰撞力,确保人机协作安全。
七、安装调试:确保系统运行
高精度安装校准:采用激光跟踪仪校准底座安装误差,某工程机械企业将误差控制在±0.05mm内。
分阶段调试流程:先单机调试后联机调试,某光伏电池片生产线因跳过单机测试,联动运行时出现12台机器人动作冲突,整线瘫痪36小时。
量化验收标准:连续72小时无故障运行,定位精度波动不超过标称值20%。
八、维护管理:延长系统生命周期
三级维护机制:
操作员每日检查润滑状态;
技术员每周校验关键参数(如重复定位精度);
工程师季度性更换减速器油脂。
某日化企业通过预测性维护,将机器人故障率从每月1.2次降至0.3次。
备件科学管理:伺服电机编码器、减速器轴承等易损件储备3个月用量,避免因备件短缺导致停机。
软件定期备份:系统参数、程序文件需每周备份,某半导体工厂因未备份导致程序丢失,停产损失达80万元。
156-8307-9413
023-6036-9667
许先生 ![]()