手 机:156-8307-9413
座 机:023-6036-9667
邮 箱:safetech@cqsafetech.com
网 址:www.cqsafetech.com
重庆地 址:重庆市两江新区翠云街道云竹路21号1B幢6层
广州办事处:广州花都区碧桂园星港国际B区2栋623号
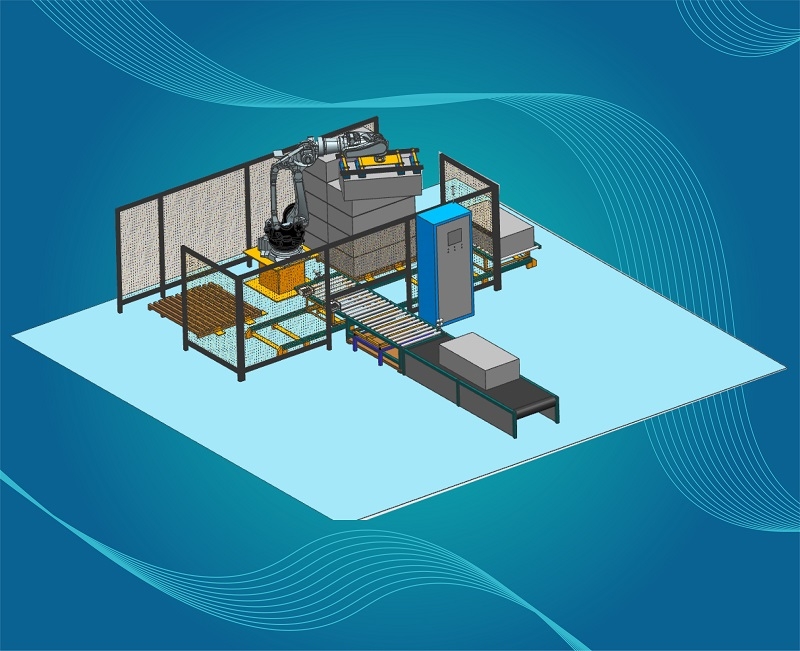
工业自动化控制系统的设计需遵循需求分析→系统架构设计→硬件选型→软件编程→测试调试→安全防护的流程,结合可靠性、安全性、高 效性、灵活性和经济性五大原则,通过模块化设计、标准化接口和冗余配置实现稳定运行。以下从设计流程、核心原则、系统架构与硬件选型、软件与算法设计、安全防护六个维度展开分析:
一、设计流程与核心原则
需求分析
工艺流程调研:明确设备结构、运行原理、关键参数(温度、压力、流量等)及工序逻辑。
控制要求:包括逻辑控制(启停、故障处理)、过程控制(参数精度、响应速度)、安全联锁(急停按钮、过载保护)、生产效率(节拍、设备利用率)及数据追溯需求。
设计原则
可靠性:关键环节冗余设计(如双电源供应),减少非计划停机。
安全性:集成安全功能(如紧急停止、故障诊断),确保操作人员和设备安全。
高 效性:优化控制策略,提高资源利用率。
灵活性:模块化设计,支持未来扩展。如预留接口以适应新增设备或工艺流程。
经济性:合理控制成本,延长设备寿命。
二、系统架构与硬件选型
系统架构
分层分布式架构:包括现场控制层(传感器、执行器)、监控层(HMI、SCADA)和管理层(MES、ERP)。
通信网络:优先选用工业以太网(如Profinet、EtherCAT),确保数据传输实时性(传输延迟≤5μs)。
硬件选型
控制器:根据I/O点数选择PLC(如西门子S7-1200)或工业PC。小型系统可选模块化PLC,大型系统选用DCS。
传感器:根据测量参数(温度、压力)选择类型,确保精度、响应速度与环境适应性。
执行器:匹配负载特性(如电机扭矩≥200N·m),考虑控制方式(脉冲、模拟量)和寿命。
三、软件与算法设计
控制算法
PID控制:适用于温度、压力等参数的准确调节。
先进算法:复杂对象可引入模糊控制、神经网络控制。
运动控制:针对机器人、数控机床,制定伺服电机选型、驱动器参数配置和运动曲线规划。
软件编程
编程语言:采用梯形图、ST语言或功能块图,实现联锁、互锁和故障诊断。
仿真测试:在虚拟环境中模拟异常工况(如断电重启),验证程序鲁棒性。
四、安全防护与数据管理
安全系统
硬件防护:集成急停电路、安全继电器或安全PLC(如Pilz PNOZ)。
网络安全:部署防火墙、入侵检测系统,加密数据传输,设置访问权限。
数据管理
数据采集:部署SCADA系统,实时采集关键参数(如能耗、设备运行时长)。
追溯系统:记录原料批次、生产过程数据,支持快速召回。
156-8307-9413
023-6036-9667
许先生 ![]()